
最新バイクは電子制御のかたまり! でもバイクのTBWとか電制っていまいちよく知らないけど気になる・・・ ワークスは電子制御がスゴイんだよね? 市販車とどう違うんだろう? って興味を刺激します!!
こんにちは! @Andyです。
今回はCBR1000RRの2018年モデル(SC77)の電子制御スロットルが持つ機能について紹介します。 基本的な考え方やシステム構成は他社もほぼ同じなので参考になると思います。
MotoGPはもちろん、各社SS車のフラッグシップにはてんこ盛りの電子制御システムが搭載されるのが当たり前になりました。 レーサー用CBR1000RR(SC77)は10年前のMotoGPマシンの制御機能とにかなり近づきました。(性能は異なる)
基本的な考え方は市販車もレーサーもMotoGPマシンも変わりませんので、自分のマシンをいじる楽しみを増やすことにつながれば嬉しいです♪♪
記事の目次
1. 電子制御スロットルシステムってなに?
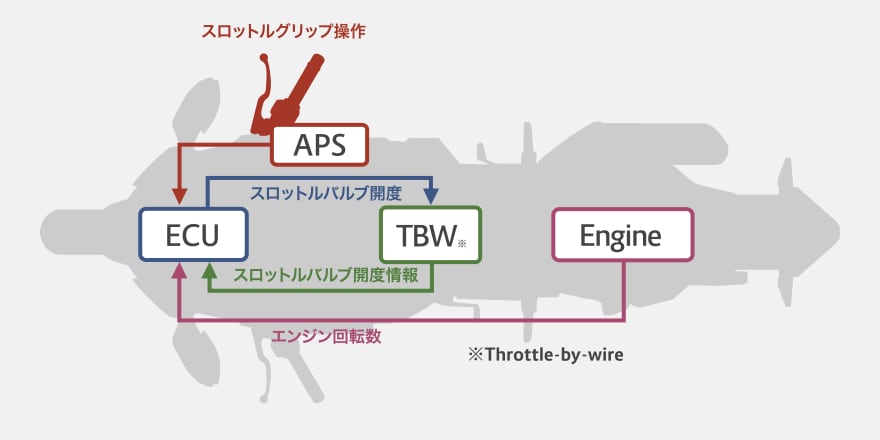
ざっくり言うとこう言うことになります↓
電子制御になる前はライダーの脳ミソがエンジン出力をコントロール。
電子制御ではECUがエンジン出力をコントロール。
- ライダーがスロットルを開ける(or閉じる)
- グリップ横のセンサーが開度を検知
- 開度情報をECUが常時モニタリング(監視)
- ECUがバイクの状況を判断しBESTなENG出力を計算
- スロットルバルブ開度情報をモーターに送信
- モータによってバタフライバルブが開く
- エンジン出力(回転数)が上がる
- ライダーがスロットルを開ける(or閉じる)
- 動きをスロットルケーブルに伝達
- ケーブルに繋がれたスロットルバルブが開く
- エンジン出力(回転数)が上がる
- ①に戻りライダーがエンジン出力を調整する
ざっくり比較するとこのようになります。 一番の特徴は何といってもスロットルボディのバタフライバルブをモーターで開閉するのか? それともライダーが開閉するのか? の違いが大きな特徴です。
2. 電子制御スロットルのシステム構成を知る
実際のシステムはどうなっているのか? どんなセンサーがあって何を演算しているの? って事を知ると理解が深めることができます。
制御する為に重要な役割を持つセンサーは下記の5つです。 ※これらの他にも例えば水温センサーなどもパラメーターに入っていますがここでは割愛します
- APS=Accell Positon Sensor ライダーのスロットル開度を検出するセンサー
- ECU=Engine Controll Unit 様々な情報を処理、演算するコンピューター
- TBW=Throttle By Wire モーターでバタフライバルブを駆動させるアクチュエーター
- IMU=Inertial Measurement Unit 俗にいうジャイロセンサーの事で車体姿勢を検知する
大きくこの4つのセンサー、コンピューター、アクチュエーターを使ってライダーの右手の動き(アクセルを開けた動き)を電子制御しています。
ちなみにモータースポーツで初めてTBWが採用されたのは1992年の第三戦ブラジルGPにてマクラーレンチームが初採用したとされています。
それぞれの機能部品の詳細はどうなっているのでしょうか?
構成1. アクセルポジションセンサー(A.P.S)

スロットルハウジングの中にセンサーがあります。
このセンサーがライダーの操作を検知してECUに送っています。 このセンサーのお陰でライダーが素早くアクセルを開けたのか?それともゆっくり操作しているのか。 定速で走行しようとしているのか?
ライダーの意思をECUが判定できるようになりました。
電子制御でないモデルはケーブルでスロットルバルブをライダーが直接動かしています↓
 手首の動きでケーブルを引っ張る。
手首の動きでケーブルを引っ張る。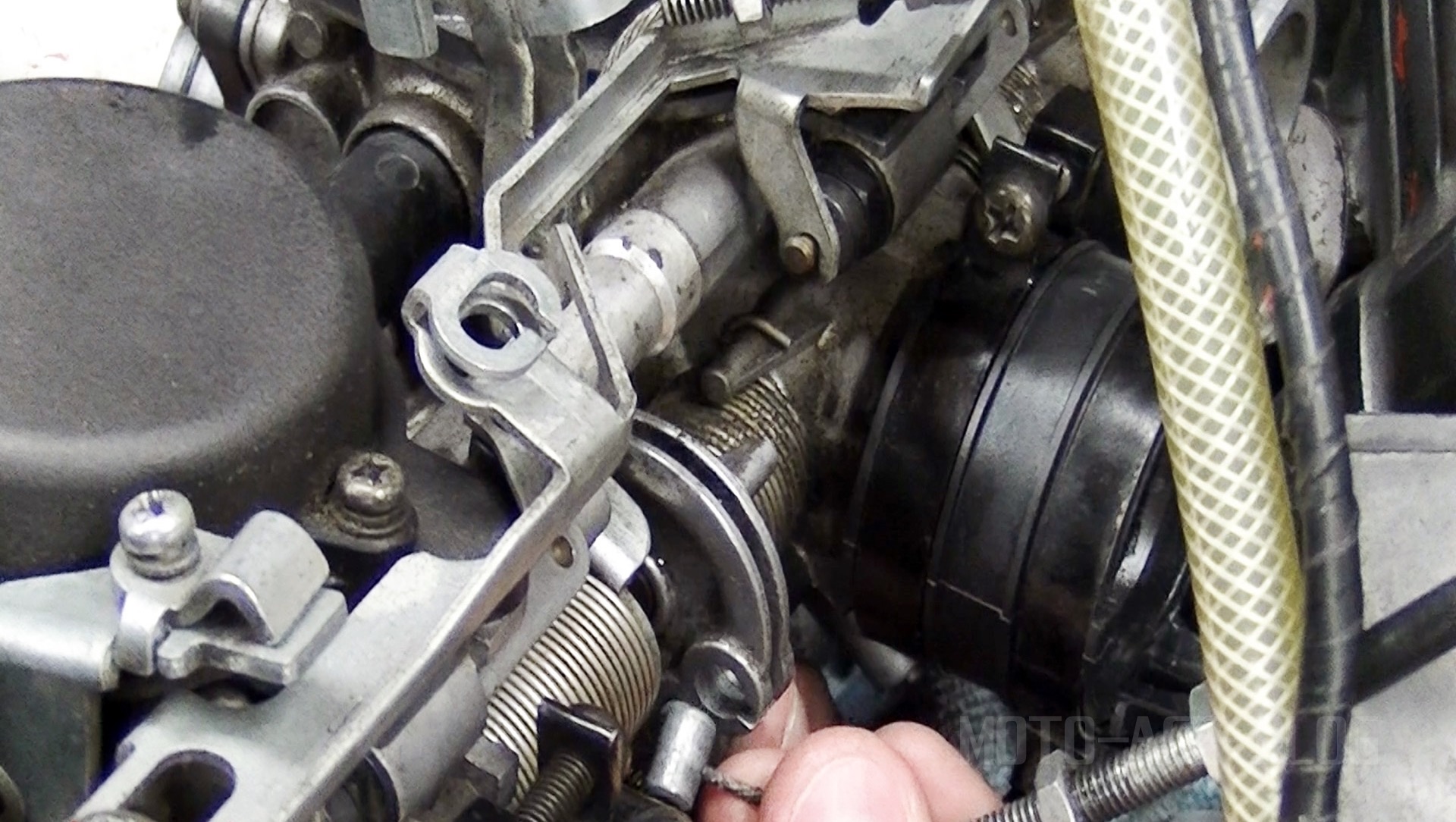 引っ張られたケーブルがスロットルバルブを開閉させる。
引っ張られたケーブルがスロットルバルブを開閉させる。
ライダーがスロットルを回すとケーブルが巻き取られて(引っ張られて)スロットルボディのバタフライバルブを開け・閉めする仕組みです。
従来型のシステムは、ケーブルを介してアクセルの動きを伝達。
電子制御システムは、電気信号でアクセルの動きを伝達。
構成2. ジャイロセンサー(IMU)
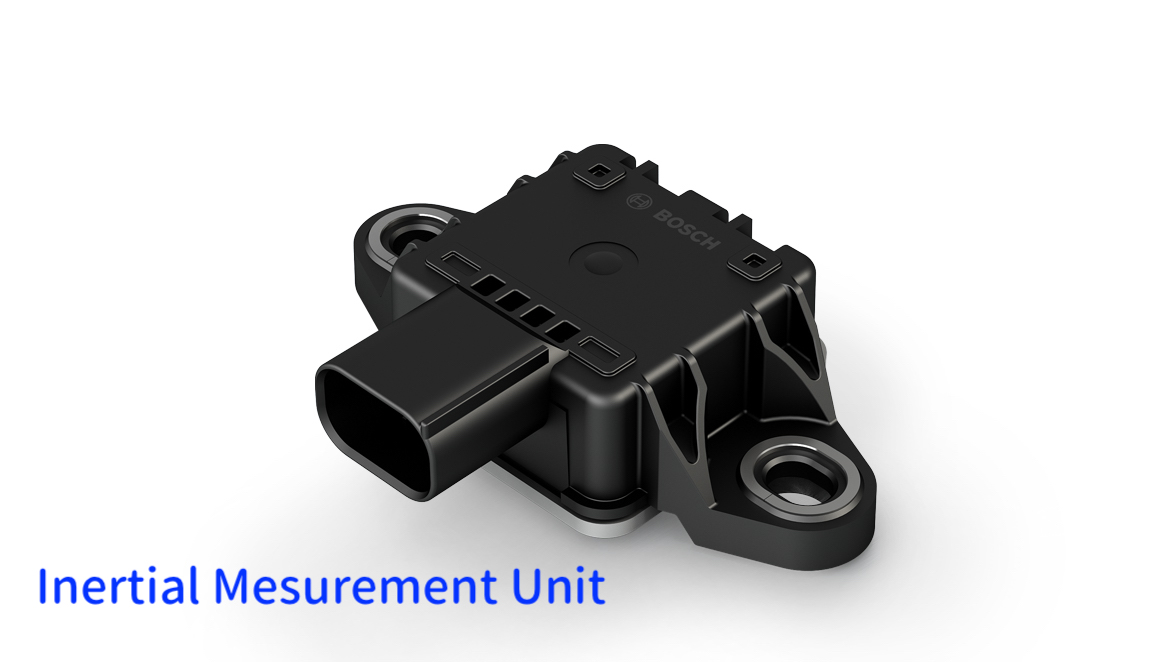
コレが現代バイクのセンサーの王様と言っても過言ではないボッシュ製のIMU(慣性計測装置)です。 唯一YAMAHAのYZF-R1はYAMAHA製のIMUを搭載しています。 (GSX-R1000はコンチネンタル製)
HONDA、KAWASAKIで使用されるIMUは現在は全てボッシュ製となっています。
6軸とは「角速度センサー3軸+加速度センサー3軸」を意味します。
バイクの電子制御スロットルにおいてはバンク角、加速G、減速G、ピッチングモーションを主に制御パラメータとしています。
構成3. スピードセンサー
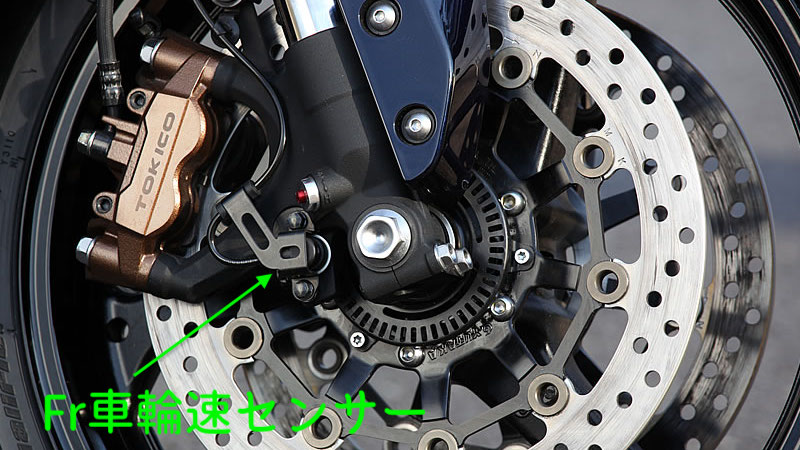

3つの速度センサーを使ってバイクがどんな走行状況なのかをECUが判断しています。
ECUの判定項目抜粋
| バイクの状態 | Fr車輪速 | Rr車輪速 |
| 定速走行 | 一定 | 一定 |
| 加速 | 増 | 増 |
| 減速 | 減 | 減 |
| ウィリー | 減 | 増 |
| スピニング | 微増 | 増 |
| スキッド | 減 | 微減 |
二つのセンサー値の変化状況をECUが常にモニタリングし、ウィリーしたのか? Rrタイヤがスピニングしたのか? 減速中なのか? などの状況を判断しています。
この2つのセンサーの情報を元に制御を行っていたのがSC59です。 上記情報をECUへとフィードバックしECUが補正信号を発令する、といった順序です。
ここにジャイロセンサーが加わるとどうなるか・・・?
構成4. ECU

SC59よりも二回りほど大型化しました。 コネクターの数も2→3つへと増えて処理能力が大幅にUP。 まさに現代バイクの制御をおこなう司令塔です。
そしてSC59までとは決定的に異なる制御ロジックを積んでいます。 それは・・・??
フィードフォワード制御が可能になったこと。
SC59まではフィードバック制御のみ。 世の中ではドローンや歩行ロボット分野などでは当たり前の制御ロジックですがバイクはつい最近です。
そしてこのフィードフォワード制御はジャイロセンサー(IMU)が搭載されたことで可能になりました。
まずフィードフォワード制御大まかな概要としては、”結果を予測できる”ことが大きな特徴です。 これ以上アクセルを開けたら滑りそうだから制御を入れる準備をしよう! とECUが判断することができます。
対するフィードバック制御は、滑ったぞ! よしトラクションコントロール制御を入れよう! と言う順序になっています。
コーナーからの立ち上がりのウィリー制御を例に、制御順序を比較するとこのような違いがあります。
- アクセルを開ける
- ジャイロセンサーが加速Gを検知
- ECUがウィリー限界に近づいた事を判定
- 浮く前に少しづつ制御を介入
- スロットルバルブ開度を制御
- フロントタイヤが浮く
- 車体姿勢(ピッチング)とGを常に監視
- タイヤ~路面高さが5㎝となるよう出力制御
- ウィリー限界をキープしたまま加速する
- アクセルを開ける
- 人間がGを感知
- フロントタイヤが浮く
- ECUがウィリーを検知
- 制御を介入
- フロントタイヤ着地 → 3へ戻りループする
フィードフォワード制御を別名オープンループ制御、フィードバック制御の事をクローズドループ制御と呼ぶ事もあります。 どちらの方が優れていると言う事ではなく、それぞれ得意分野が異なるのです。
料理に例えるとこんなイメージ♪♪
炒飯に塩コショウをかけるときに、、、
炒飯が〇人分だから塩コショウの量はこれくらい、、って思って(味を予測して)かけるのがフィードフォワード。
ちょっとづつ、味見しながらかけていくのがフィードバック。
王将の炒飯は、ほとんどフィードフォワード制御で作られていますw
フィードバック制御は目標に対して正確に到達できるけど、時間がかかる。
フィードフォワード制御は目標を予測して制御するから応答スピードが速いけど正確性は劣る。
今はフィードバックとフィードフォワードのいいとこ取りができるように制御プログラムを組んだら、能力も容量もたくさん必要でECU君がでっかくなっちゃった!!(^^)! ってイメージです。
フィードフォワード制御
- 制御の効き方が自然である。
- バイクの挙動が乱れにくい。
- 予測値を正確に入力する必要がありスキルを要する
- 制御応答速度が速い
フィードバック制御
- 目標制御値の正確性が高い
- 事象が起こってからの後追いの為、応答速度が遅い
- 目標値を入れるだけで制御ができ簡単
現在のTCSはフィードバックとフィードフォワードの良いとこ取りをしているので、両方の制御プログラムが入っています。
はやりミソは「もうタイヤが滑りそう!」、「もうウィリーしそう!」、「もうジャックナイフしそう!」これらの予想をECUが判定できるようになった事が大きいですね。
その結果、制度の高いTCS、ウィリー制御が可能になり効き方が自然で違和感が格段に減りました。
今までのウィリー制御はウィリー→ 制御→ Frタイヤ着地→ 制御が切れてまたウィリー、の繰り返しだったので挙動が乱れるんですよね。(でも無いより有ったほうが良い)
トラコンも同じでスリップ→ グリップ→ スリップ→ グリップ を繰り返してしまいます。 フィードバックはあくまで事象が起こってからの対処療法なので限界があります。
ジャイロセンサーは今現在も物凄い勢いで進化しています。 とくにロボット分野では9軸が当たり前になりつつあり、今以上に正確且つ高速な制御が可能になると思われます。
バイクの制御もスゴイ勢いで進化していくことは間違いないでしょう。 個人的にはあと5年でスマホからセッティングデータを転送する時代が来るんじゃないかな? と思ってます。
例えばAndyの鈴鹿セッティングデータをアプリを通じてシェアできる、みたいな? スマホのGPS情報で鈴鹿サーキットにいる事がわかれば”TRUCK MODE”に自動的に切り替わる、なんてのもどうでしょう?
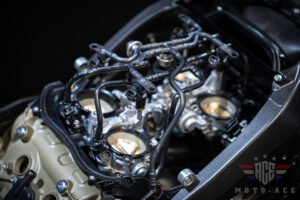
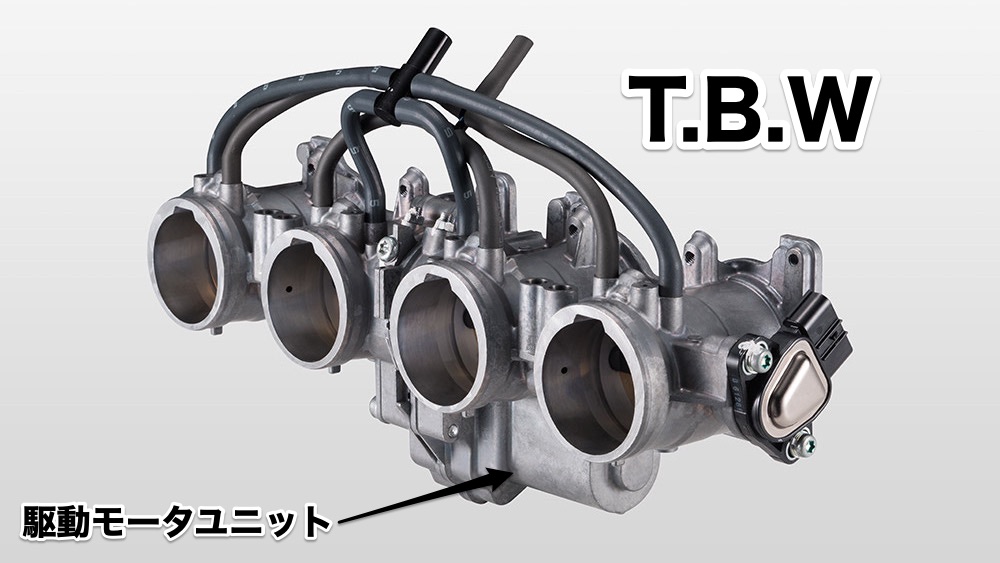
構成5. TBW(Throttle By Wire)
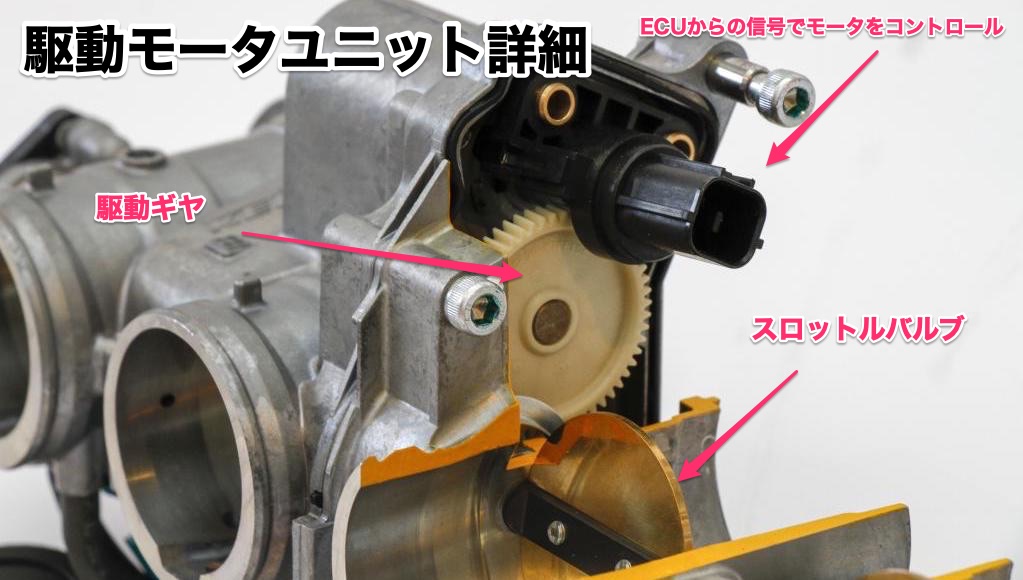
↑上下逆さに写っています。 写真右側がエアクリーナ側、写真右側がエンジン側です。 スロットルバルブをモーターで駆動します。
新旧のシステムを比較するとこんな感じ!! ↓
 電子制御スロットルシステム
電子制御スロットルシステム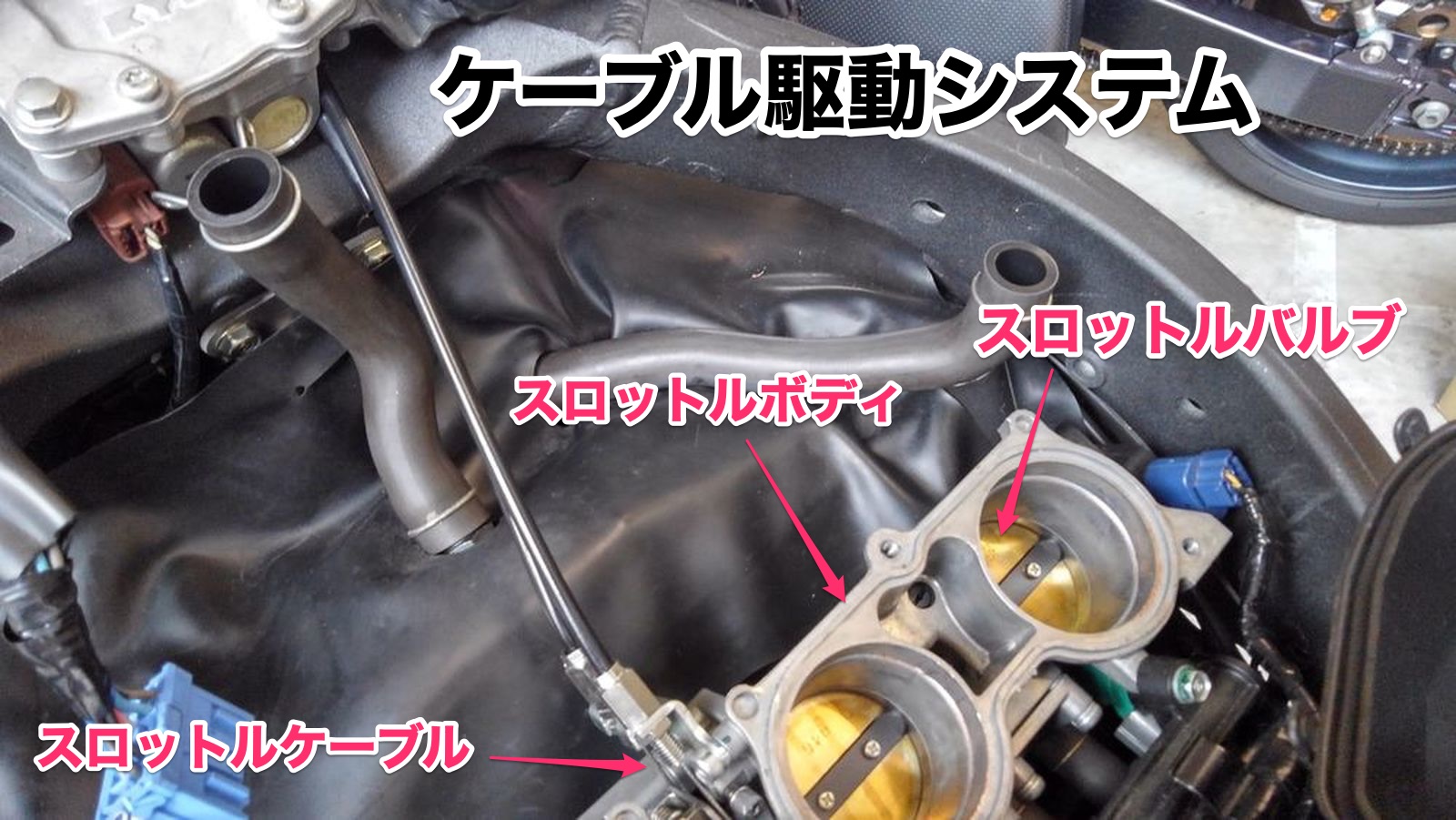 ケーブル駆動システム(従来型)
ケーブル駆動システム(従来型)
電子制御スロットルシステムのアクチュエータであるスロットルボディにはケーブルが連結されていません。 ECUから受け取った開度信号を元にモーターがスロットルバルブを開閉します。
従来タイプのケーブル駆動システムは、ライダーがスロットルグリップを開けるとケーブルが巻き取られ、スロットルドラムを介してスロットルバルブが開閉します。
アクチュエータ(英: actuator)は、入力されたエネルギーもしくはコンピュータが出力した電気信号を、物理的運動に変換する、機械・電気回路を構成する機械要素である。能動的に作動または駆動するもの。
3. 街乗りバイクにおける電子制御スロットルのメリット
システム構成は分かったけど、実際ツーリングでつかうとどんなメリットがあるのか? 解説します。
メリット1. ツーリングが楽!
軽量な車体にハイパワーなエンジンがマッチするシチュエーションもありますが、 クルマの隊列に沿って定速で走るとスロットルをチョット開け閉めしただけで敏感にバイクが反応してしまいます。
こういう時はレスポンスが鈍感なほうが楽に走れます。
TBWを装備しているバイクは、パワーマップを選ぶことで走行シーンに最適なエンジンレスポンスを選ぶことができるんです。
新型ゴールドウィング1800で長野へツーリングに出かけた時に、パワーマップを切り替えて走行しましたが、瞬時にレスポンスキャラクターを変える事ができ、高速ノンビリ走行、ワインディングキビキビ走行など常に欲しいレスポンスが得られます。
メリット2. 好みの乗り味に近づけられる!
パワーモード、ウィリー制御、エンジンブレーキなどを好みに合わせる事ができます。
燃料噴射量や点火タイミングでは排ガス値が変わってしまう為、今までのケーブルタイプでは不可能でした。
今回はTBWによってそもそもの大元であるスロットルバルブ開度をセッティングできる為、ライダー毎、走行シーン毎に合わせこみができます。 しかも簡単に!
メリット3. インパネ回りスッキリ!
ケーブルは小さく折り曲げる事ができません。
対するTBWは電気配線(ワイヤー)で、ケーブルに比べ小さく曲げる事が可能。 メーター回りがスッキリ見やすい♪♪
特に今はスマホホルダーを装着するオーナーもかなり多いですよね。 後付けでレイアウトしたいパーツに対しても新たなスペースが生まれます。
メリット4. エアボックス形状スムース化!
機種にもよりますが、スロットルボディとスロットルケーブルは必ず隣接します。
SSバイクの場合、空気をロス無く取り込めるようにスロットルボディの真上にエアボックスが配置されています。
そうするとエアボックスとスロットルケーブルとのクリアランスを確保する為に、エアボックス形状に凹形状が必要なる場合が多くあります。
ワイヤー(配線)の場合はケーブルに対してレイアウト自由度がありエアボックス形状に無理が生じにくいと言えます。
メリット5. メンテナンスフリー
スロットルケーブルタイプでは、遊び調整とワイヤーへの給油が必要でした。(頻繁ではないが)
対してTBWはメンテは要りません。 遊び調整も注油も不要!
但し、立ちごけや転倒などして、右側ハンドルが路面と接触した場合などは、点検整備などが必要です。 定期メンテナンスは不要ですが、定期点検は必要です。
デメリット
今までのケーブルタイプと比べ、できなくなってしまった事もいくつかあります。
ケーブルならではの操作感が無い
APS(Accell Positon Sensor)の反力はスプリングで得ており、メッチャくちゃスムーズに動きます。
ケーブルタイプは、ケーブルとケーブルガイドがこすれる感じのフィーリングがるのです。 この”こすれ感”がなんとも気持ちいいしコントロールしやすい! と感じるライダーも居ます。
ペドロサ選手はTBWのシステムにわざわざお金を掛けてケーブルを追加していました。 今現在ではDUCATIのドビチオーゾ選手もケーブル + TBWのシステムを使用しています。
ハイスロ化できない
ケーブル式ではスロットルコーン(樹脂の筒)を社外品の物と交換する事で、ハイスロ化がとても簡単でした。
TBWでは交換する事ができません。
※CBR1000RRのレーサーの場合は、HRCからハイスロキットがリリースされており、お値段約10マンエン・・・"(-""-)"
ハンドル交換できない
特にアメリカンなどで、チョッパースタイルにする場合など、配線を延長しなければなりません。
しかしAPSは精密部品であり、ハーネスを延長すると抵抗値が変化しますし、延長ハーネスを装着したことにより補償対象外扱いになることは目に見えています。
ジムカーナなどSSバイクをアップハンにカスタムする場合などちょっと困りそうな予感。
今までのようにサンデーメカニックが気軽にハンドル交換♪♪ と言う訳にはいかないでしょう。
4. Moto GPマシンの電子制御はどうなってるの?
現在のMotoGPのレギュレーションの一つに、ECU及びソフトウェアは共通の物を使用しなければならない。となります。
つまりセッティングでできることは全チーム&全車同じと言う事になります。
その中でTCSの効き具合や制御の有り無しなどセッティングは各ライダー独自に決める事ができます。
例えるならiPhone本体は全員同じでOSも共通。でもどんなアプリを入れるかは個人の自由、といったイメージです。
制御機能の違い
では実際市販車とできる事では何が違うの? を大まかにまとめました。
| 電子制御機能 | MotoGP | CBR1000RR |
| ウィリー | 〇 | 〇 |
| TCS | 〇 | 〇 |
| パワーマップ切替 | 〇 | 〇 |
| エンジンブレーキ | 〇 | 〇 |
| クイックシフター | 〇 | 〇 |
| 点火時期 | 〇 | ✕ |
| 燃料噴射時期 | 〇 | ✕ |
| 燃料噴射量 | 〇 | ✕ |
| タイヤ周長補正 | 〇 | ✕ |
| スタートモード | 〇 | ✕ |
| サスペンション | ✕ | 〇 |
点火時期や燃料系統の制御は、市販車で調整することができません。これは世界的に厳しくなりつつある排ガス規制をクリアできなくなってしまう為です。
また点火時期調整は早めるとノッキングを発生させやすく、エンジンを破損させてしまいます。
ソフトウェアの機能と性能がすごすぎる!
MotoGPマシンの制御セッティングを行うソフトウェアがスゴイ!
例1. シフター制御
クイックシフターがGPマシンにも装備されています。
シフトペダルを踏むと点火がカットされ駆動力が ”0” になります。 その瞬間にシフト操作ができるのでアクセルを戻すことなくギヤチェンジができる優れもの。
GPマシンの場合は
- 点火カット回数
- 点火カット開始のシフトペダル入力荷重
- 点火カット→ 点火が復帰するときの特性
- 点火カット中の燃料噴射量、有無
こんなことがPCで簡単に調整できるようになっています。
例2. トラクションコントロール
Moto-GPマシンのトラクションコントロールは相当複雑怪奇と言って過言ではありません。
- ⊿スリップ制御
- 制御トリガー調整
- 制御量調整
- 調整手法(点火・噴射・TBW)
- 効果確認(ライダーコメント・ロギングデータ)
トラクションコントロールをセッティングする際、効く量を増やすのか? 減らすのか?
効き量はいいけど、もっと滑り出す最初から聞かせたいのか? それともビッグスライドだけを抑えたいのか?
効き量の調整は、点火時期を遅らせるのか? それとも燃料噴射量を調整するのか? またはTBWで絶対出力を制御するのか?
これらをエンジニアはライダーからの要望、データを踏まえて最適な方法と量でセッティングしていきます。
例3. ロギングデータ解析
最近ではキラキラネームが一般化し「テレメータ」とか「テレメトリー担当」なんて言い方もしますね。
言ってみればそのライダー専属のデータエンジニアの事を指します。

とマルケスが改善を訴えたとします。
するとテレメ担当は即座にロギングデータをPC上で確認し、マルケスの事象がどこで(GPS)、どんなENG回転数で、どのくらいのスロットル開度で、どの程度のスピニングが出ているのか? を確認します。
その結果、ラップを重ねるにつれてスピニング量が増えていることが分かると、タイヤの消耗によってグリップレベルが低下していることが考えられます。
その場合は、TCSの効きを一律に上げるのではなく、別マップを用意してレース後半のタイヤが消耗したとき用のマップとして準備します。
その結果、タイヤをレース距離の中で最も有効に使う事につなげる事が可能になります。
この辺をうまく理解していないエンジニアだと、「一律にTCSの効き量UP」と言う手法を取ってしまい、レース全体でアベレージダウンさせてしまいます。(本来グリップするレース前半もバリバリ制御が効いてロスしちゃう)
なので現代の電子制御システムは、”何でも調整できる”からこそ、「全体ベスト」、「レースベスト」の考え方を持ってエンジニア自ら主導しないと、間違った方向に簡単に走ってしまいます。 (PCでエンターキー叩くだけで簡単に変更できるから間違えるのもまた早い)
- ライダーコメントを確認
- ロギングデータを確認し、コメントと照合
- 目標(値)を決定
- 手法を決め、制御プログラムを変更
- 効果確認
大まかにこんな手順でフリープラクティスでセッティングを詰めていきます。
ロギングデータってなに?
データロガーに格納されているマシンの走行状況を記録したデータのことです。
MotoGPマシンはライダーが訴える事象や症状、トラブル発生の事前&早期発見を目的に様々なデータを収集しています。
飛行機で言うところの「フライトデータレコーダ」ですね。 どんなデータを取っているかと言うと・・・代表的なものとして
・スロットル開度
・スロットルバルブ開度
・スロットルグリップ開度
・Frタイヤ回転数
・Rrタイヤ回転数
・TCS作動記録
・スタートモード使用記録
・レバーアングル
・ハンドル切れ角
・選択された走行モード
・吸気温度
・ラジエタ入口温度
・ラジエタ出口温度
・Air/Fuel レシオ(排ガス)
・発生G
・PVRSボンベ残圧
・エラーコード
・サスストローク
・シフトペダル入力荷重
・予想燃料残量
・Air-BOX内圧
代表的な項目をピックアップしましたが、実際には100項目以上のデータを走行中常に収集しています。 各専門エンジニアが必要なデータを取得して解析→ 改善→ 効果確認→ 解析とサイクルを繰り返すなかで乗りやすく強いバイクを仕上げていきます。
また、レースの事後テストなどにおいてはタイヤメーカーからの依頼がある場合があり、タイヤの温度をモニタリングする事もあります。 エッジ、ミドル、センターでどのような温度状況なのかを把握しタイヤ開発につなげています。
またタイヤウォーマーの設定温度を決める判断材料にすることも。
ピトー管を装備して走行動圧とAirBOX圧をサンプリングし、吸気圧力ロスを計測することも可能です。(吸気経路が細く長いとロスが大きくなり、速度を活かせなくなる。 基本、吸気ダクトは太く!短く!)
各セクションの専門エンジニアが必要なデータを総合的に分析し、もっと乗りやすくて強いバイクにす為の方法を日々進化させています。
5. バイクの電子制御スロットル(TBW)まとめ
今現在、キャブレターのバイクの新車販売が無くなったように、スロットルケーブルが完全になくなる日はもうすぐそこです。
キャブ → FI(燃料噴射)へと変化したときも、当初はドン付きが酷かったりフィーリングに合わなかったり、様々なトライ&エラーを繰り返していましたが今じゃ何てことありません。
同じようにケーブル式 → 電子制御式へとスロットル駆動方式が変わっていき、バイク用品店からは”スロットルケーブル”の在庫が消えることでしょう。
バイクもTBWだけでなく、アクティブサスとの連携も進んでもっと楽しい! もっと面白い! 乗り物に進化して行って欲しいですん。
また、走行データを記録するロガー機能もDUCATIなど一部高級マシンには装備され始めています。 これもコスト改革が進んで安くなれば、都民の森やスカイポート亀石でスマホを使ってデータの見せ合いっこ! なんて光景も間近なのかもしれませんね!
これから益々電子制御&システムは面白くなりそう♪♪
ツーリング先でのダべリングネタに使って頂けたら嬉しいです。
長文、最後までご覧いただきありがとうございました!
Let's Fun! Ride! Run!
ANDY